-
家用 NAS 踩坑指北
某一天,当你 { 不想把数据放在云上,想有一个 home lab } 时,你可能就会进入一个深坑。
这里记录了一些过去几年以来搭建 NAS 过程中发生的事情。但是在继续之前还是想说一句,在捡垃圾或者买新品之前认真考虑一下,或许手头的东西已经能够实现自己的需求了,又或许自己根本没有想象中的需求。总之就是千万别上头!
在开头先来展示一下我遇到的最大的一个坑,你能看出下面这根线有什么问题吗?
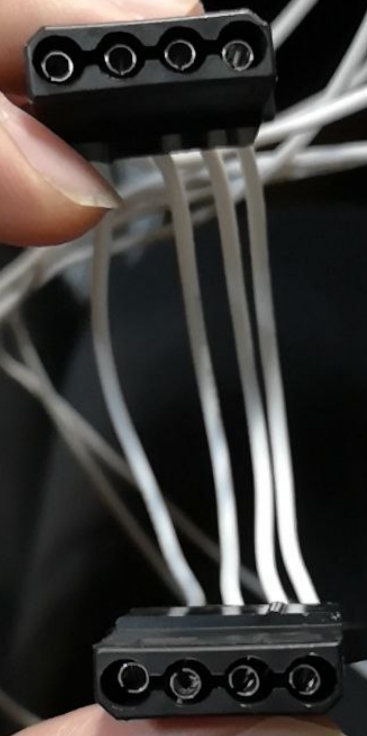
-
Surface Pro 8 安装 Arch Linux
好久没有用 Linux 的桌面环境了,这回打算给 Surface Pro 8 装个 Arch (with ZFS on LUKS) 看看。目前看起来使用 linux surface kernel 之后除了摄像头和 Hibernate 以外都可以得到支持。
-
记录一次服务器硬盘扩容
前一段时间组里的一些机器硬盘满了,需要进行扩容。这些机器的盘一共是 4 个 1.8T 的固态,接在一张 LSI9361-8i RAID 卡上,组成一个 RAID5 使用。机器上可用的盘位还有 4 个,我们决定给这个阵列扩充两个同样大小的盘。
-
用 ESP8266 制备室内温度和空气检测器
之前用闲置的树莓派搭了个室内的温度和空气质量监测器,但是问题是树莓派太贵了,这样的方案不太容易批量复制。另外一种便宜的方案是用 ESP8266(大约十来块钱)来作为传感器和电脑之间的中介,它可以通过自带的 WiFi 和电脑连接。
-
重新恢复博客之后的一些话
几年前因为觉得麻烦关掉了这个博客。
-
博客搬家及主题更换
2020 真是糟糕的一年,从寒假离校到现在已经在家里半年了。六月本该返校毕业,但是北京疫情突然反弹,返校被临时叫停。
-
NonTrivialMIPS - FPGA 上实现的 MIPS32 流水线
前一段时间我和几个同学参加了个比赛,这个比赛是自己设计一个 CPU,在其上设计 SoC,运行操作系统等。是一个系统类的比赛。我主要负责写 CPU 除 Cache 外的部分,我们最终设计了一个有十级流水的双发射顺序执行的 MIPS32 处理器。在比赛方提供的实验板上达到了 123MHz 的主频,同时还具有不错的 IPC。代码现在已经在 GitHub 上开源。